



スイスEPFL研究所のチームが、三角板(ポリゴン)状のモジュールを複数組み合わせることで、目的に応じた形状、機能を備えた1機のロボットになる、省スペース多用途ロボット「Mori3」を開発しました。
宇宙船内の狭い空間には、飛行士を手助けするために単特定のタスクをこなすためのロボットをいくつも持ち込むことはできません。 Mori3システムは、モジュールひとつひとつが板状であるため、使わないときはバラバラにして積み重ねて保管でき、使うときは3Dゲームのポリゴンのように目的の形状を構築、必要な機能を持たせることができます。
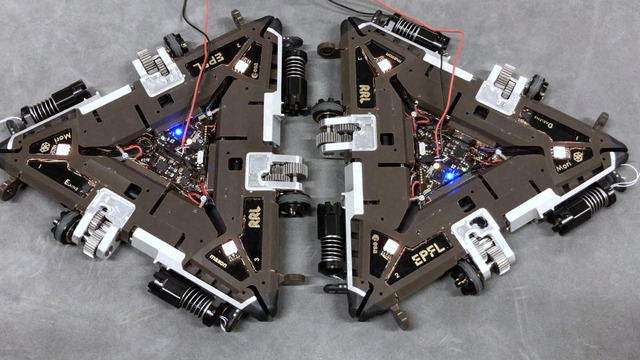
モジュールにはそれぞれモーターやバッテリー、センサーなどの電子機器、機械的な接続・結合機構が備えられています。モジュール同士は三角形の辺の部分で結合し、三次元形状を構成します。
そうしてできあがるロボットのサイズや形状は、求められる動作や用途によって異なります。たとえば、4脚歩行するタイプであったり、車輪のようにして移動するタイプだったり、またはロボットアームのような形状かもしれません。
研究者らはMori3で構築したロボットには、ロボットに求められる「自らの動力で移動する」こと「使用者と対話する」こと、「物を扱ったり運搬できる」ことを重要な3つの機能として備えると述べています。
ロボット工学の博士研究員Christoph Belke氏はこのロボットを実現するため、「これらのロボットが自分自身の形状を変え、互いに接続し、通信し、機能的かつ関節構造を形成するために再構成できるよう」「ロボットに対する理解の仕方を見直す必要があった」と述べました。
EPFLの再構成可能ロボット研究所長、Jamie Paik氏は、「Mori3の目標は、環境や課題に応じて組み立てと分解が可能なモジュラーな折り紙のようなロボットを作成することだ」と述べています。
このようなモジュラータイプの多機能ロボットは、特定のタスクをこなすには多少効率が低いかもしれません。しかし研究者らは、多用途であることによって、宇宙船内で飛行士たちを支援したり、船体の修復を行ったりするなどのタスクに活用されることを期待しています。

